BDE_Gabor
BDE_Gabor_DS
BDE_RPC
ME_Gabor
MEO_Gabor
Parameter Text Files
Binocular Disparity Energy after Chen, Wang and Qian
Summary
This binocular disparity energy (BDE) model has linear spatial filters that are
3-D Gabor functions (Gaussian times sinusoid) and varying temporal filter generating
a range of selectivities for both binocular disparity and motion direction.
This model was described by Chen et al (1990). There are 4 variants based on those shown in
their Figure 2: tuned excitatory (TE),
tuned inhibitory (TI), near (NE), and far (FA) models, which also vary in strength of
selectivity for motion direction.
Results
Data Browser
- Chen Y, Wang Y, Qian N (2001) Modeling V1 Disparity Tuning to Time-Varying Stimuli. J Neurophysiol 86:143-155.
- Ohzawa I, DeAngelis GA, Freeman RD (1990) Stereoscopic Depth Discrimination in the Visual Cortex: Neurons Ideally Suited as Disparity Detectors. Science 239:1047-1051.
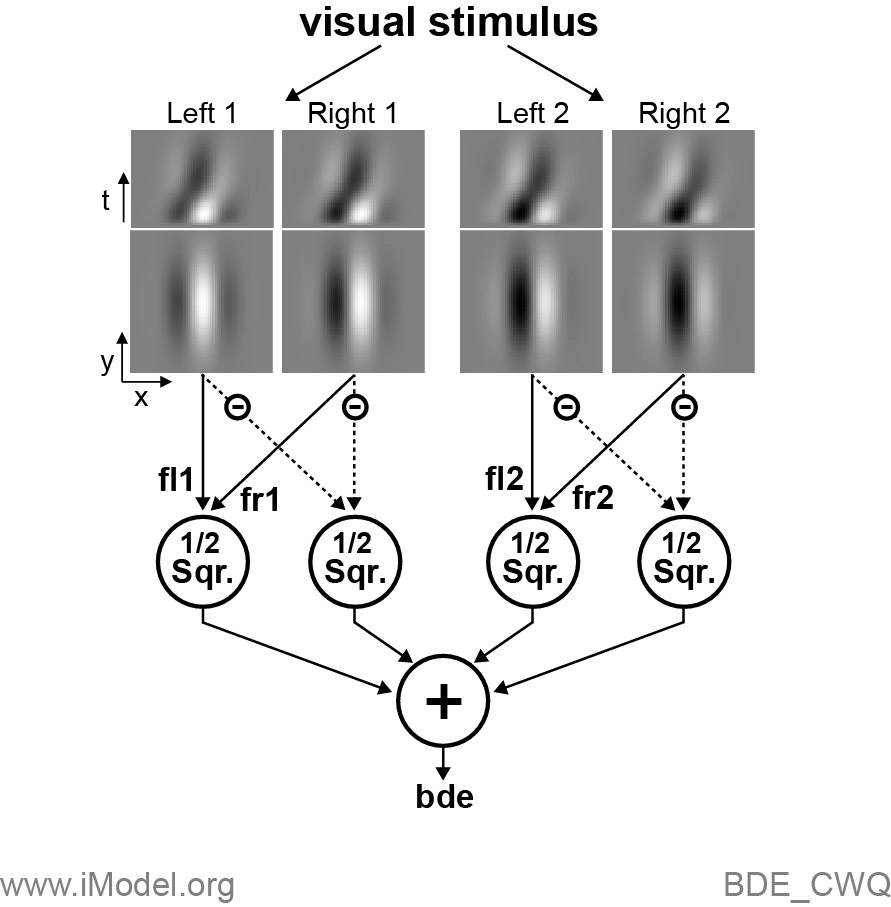
The raw signal (bde) is then offset, scaled and half-wave rectified (although the signal is typically already non-zero unless the scaling or offset has introduced negative values), and it is used to drive a Poisson spiking mechanism. The spikes are time shifted to simulate a neurobiological latency. See the model (.moo) files for the parameters that govern these computations.